-
GitHub - jhu-lcsr/handeye_calib_camodocal: Easy to use and accurate hand eye calibration which has been working reliably for years (2016-present) with kinect, kinectv2, rgbd cameras, optical trackers, and including the ur5
ID: XSgjCFuup2
From:
-
![PDF] Camera Calibration for Reliable Object Manipulation in FRIEND | Semantic](https://d3i71xaburhd42.cloudfront.net/0174898fa555ebccb194e067d592f2f021c5fc20/1-Figure1-1.png "PDF] Camera Calibration for Reliable Object Manipulation in FRIEND | Semantic") PDF] Camera Calibration for Reliable Object Manipulation in FRIEND | Semantic
PDF] Camera Calibration for Reliable Object Manipulation in FRIEND | Semantic
ID: 2aNQtZLGOQ
From:
-
 FANUC iRVision - Vision, Camera and Robot Calibration for iRVision YouTube
FANUC iRVision - Vision, Camera and Robot Calibration for iRVision YouTube
ID: lQFu5bT6Zd
From:
-
 Robot – bin picking tutorial YouTube
Robot – bin picking tutorial YouTube
ID: kPeRZw2C8Q
From:
-
 Hand-eye — rc_visard 1.6.1-1-gd84d318 documentation
Hand-eye — rc_visard 1.6.1-1-gd84d318 documentation
ID: xNPg9Kjhpq
From:
-
 Frontiers | Flange-Based Hand-Eye Calibration Using a 3D Camera With High Accuracy, Frame Rate
Frontiers | Flange-Based Hand-Eye Calibration Using a 3D Camera With High Accuracy, Frame Rate
ID: rnJTOgphLs
From:
-
 New MoveIt Calibration Capabilities from Intel MoveIt
New MoveIt Calibration Capabilities from Intel MoveIt
ID: tgZ6dB2yN3
From:
-
 camera calibration
camera calibration
ID: HPMvRAG9IA
From:
-
 benefits of 3D calibration
benefits of 3D calibration
ID: j7uQFckVou
From:
-
 Checking robot-camera calibration documentation
Checking robot-camera calibration documentation
ID: luGAplqOtW
From:
-
 - RoboDK Documentation") Robot (Laser Tracker) - RoboDK Documentation
Robot (Laser Tracker) - RoboDK Documentation
ID: rokq5FHbwF
From:
-
 Sensors | Free Full-Text | Research of Online Hand–Eye Calibration Method on ChArUco Board
Sensors | Free Full-Text | Research of Online Hand–Eye Calibration Method on ChArUco Board
ID: bnrbHccvkO
From:
-
 Hand-eye robot camera calibration -
Hand-eye robot camera calibration -
ID: pYaBNCzeKr
From:
-
 Robot Camera | David Butterworth
Robot Camera | David Butterworth
ID: 1IvQsNVXZR
From:
-
 How to execute robot camera calibration Pickit 2.0 documentation
How to execute robot camera calibration Pickit 2.0 documentation
ID: BrhNUwDhc7
From:
-
robot-camera-calibration · Topics · GitHub
ID: xKo7AVyf4O
From:
-
 benefits of 3D calibration
benefits of 3D calibration
ID: eyIN1NDJHf
From:
-
 How to execute robot camera calibration Pickit 2.0 documentation
How to execute robot camera calibration Pickit 2.0 documentation
ID: oP95n6guiP
From:
-
 Hand-eye calibration — rc_visard 21.01.1
Hand-eye calibration — rc_visard 21.01.1
ID: HnIDLlFzdG
From:
-
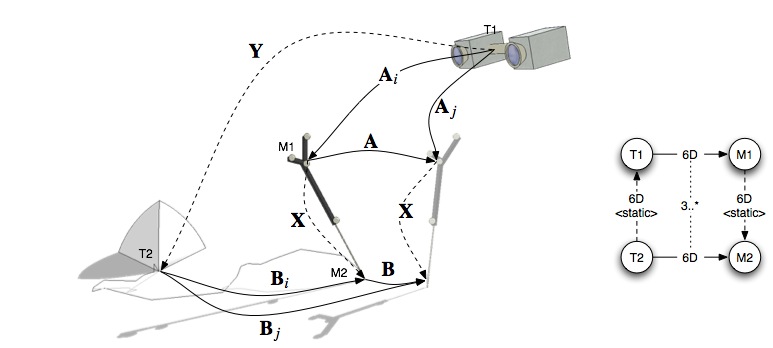
![PDF] Simultaneous robot-world and hand-eye | Semantic Scholar](https://d3i71xaburhd42.cloudfront.net/a1037e9087e66b89a8a9ca2cf1492d3c50977312/1-Figure1-1.png "PDF] Simultaneous robot-world and hand-eye | Semantic Scholar") PDF] Simultaneous robot-world and hand-eye | Semantic Scholar
PDF] Simultaneous robot-world and hand-eye | Semantic Scholar
ID: PdQQe3wZlP
From:
-
 Checking robot-camera calibration documentation
Checking robot-camera calibration documentation
ID: uNyUipENTL
From:
-
 Figure 1 from Automatic calibration of robot manipulator and multi camera system | Semantic Scholar
Figure 1 from Automatic calibration of robot manipulator and multi camera system | Semantic Scholar
ID: S5v4UKzyMF
From:
-
ID: 8u1gTGGO75
From:
-
 How to execute robot camera calibration Pickit 2.0 documentation
How to execute robot camera calibration Pickit 2.0 documentation
ID: KWTM0NSfcM
From:
-
 mounted | Download Scientific Diagram") Hand-Eye Robot-World Calibration: camera (eye) mounted | Download Scientific Diagram
Hand-Eye Robot-World Calibration: camera (eye) mounted | Download Scientific Diagram
ID: 2njNIjHafa
From: